
In un primo tempo ho pensato di utilizzare un Arduino Nano insieme ad un modulo ESP8266, ma poi avrei dovuto pensare ai due tipi di alimentazioni 3.3V e 5V, in particolare all’interfacciamento fra i pin con tensioni diverse delle due schede anche alla luce del fatto che i convertitori bidirezionali che ho in casa sembrano bruciarsi con estrema facilità. Per cui mi son detto: perché non proviamo qualcosa di diverso dal solito? Ed è così che mi sono comprato un clone Arduino M0 Mini che affiancherò ad un modulo ESP8266 per la connettività WiFi. Non ho mai provato questo tipo di scheda per cui non conosco esattamente le potenzialità della stessa. Sarà questa l’occasione per apprezzare qualcosa di più potente del solito Arduino UNO e testare la compatibilità della McMajan Library che eventualmente potrò ottimizzare anche in base a questa esperienza. Qui sotto vi riporto il link per l’eventuale acquisto della scheda che mi appresto ad usare.
|
AliExpress poco meno di 10€ mentre vi scrivo |

Si lo so che sui siti cinesi costa molto meno, ma poi dovete aspettare un mese per averla per cui l’ho presa su Amazon e ricevuta in un paio di giorni. Vediamo qui sotto una breve scheda comparativa con Arduino UNO:
| Arduino UNO | Arduino M0 | |
| Microcontrollore | ATmega328P | ATSAMD21G18, 48pins LQFP |
| Clock | 16 MHz / 8bit | 48Mhz / 32 bit |
| RAM | 2K | 32K |
| Flash | 6MB | 256MB |
| IO digitali | 14 (6 PWM 8bit) | 20 (12 PWM 8bit) |
| IO analogici | 6 (10bit) | 6 (12bit)+1DAC |
Il materiale
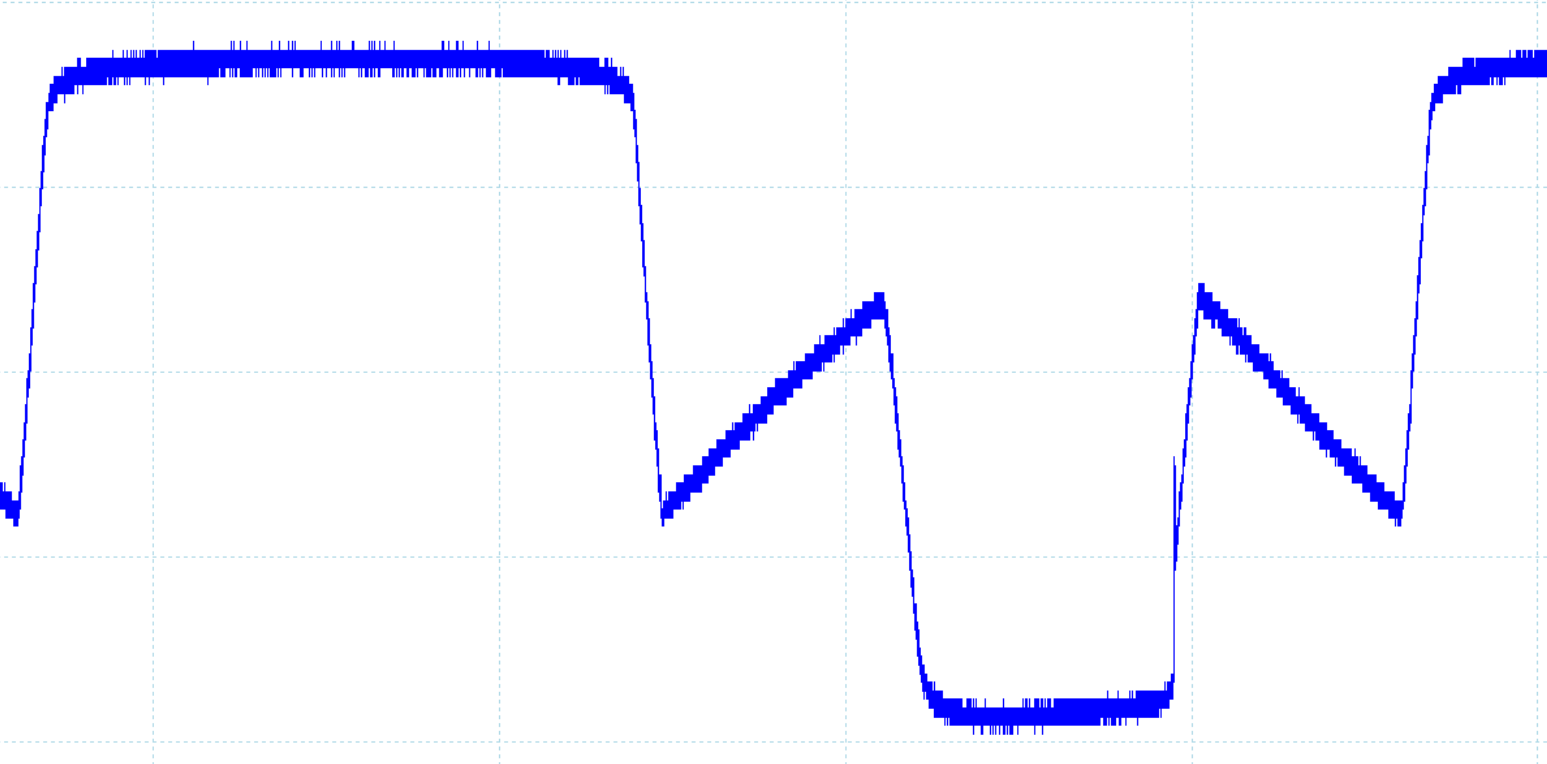
Visto che lo scorso progetto si è dimostrato molto valido, non cercherò di cambiare gran che nell’hardware, almeno per quanto riguarda la parte inerente le varie misure di tensione e corrente . Userò un trasformatore AC-AC per misurare la tensione di rete, due pinze amperometriche per misurare la quantità di energia prelevata dalla rete elettrica e quella assorbita dall’abitazione più una terza per la corrente assorbita dal “capannone” dove ho creato il mio laboratorio. Fra il materiale ci saranno anche condensatori, resistori, display lcd per visualizzare i vari dati in locale e poco altro. Ho utilizzato come mio solito un chip 74hc595 per collegare il display lcd tramite la mia libreria, ma a differenza delle scorse volte ho mandato in stampa un piccolo pcb di prova che mi permette di fare tutti i collegamenti in pochi minuti anziché perdere delle ore ad intrecciare e stagnare piccoli pezzi di cavo. La schedina in questione l’avete vista all’opera in un precedente articolo. L’hardware inerente le misurazioni non è particolarmente complesso, la parte più contorta rimane il software, ma a quello ci ho pensato io con la mia McMajan Library Pack, non resterà che configurarla in maniera adeguata. Inizialmente, rispetto gli scorsi articoli, avevo pensato di rivedere la sezione di alimentazione, in questo modo avrei potuto utilizzare un singolo trasformatore sia per le misure di tensione di rete che per alimentare Arduino ed il modulo ESP. Avevo anche già scritto quasi tutto questo articolo e iniziato a preparare l’hardware. Non mi dilungherò in questa sede sul problema riscontrato, ma alla fine ho utilizzato due trasformatori distinti, uno per l’alimentazione ed uno per la lettura della tensione di rete. Giusto per farvi capire quanto grave fosse il problema, vi mostro qui sotto la lettura “sballata” della tensione che ottenevo utilizzando un solo alimentatore, tenete conto che avrebbe dovuto essere una sinusoide:
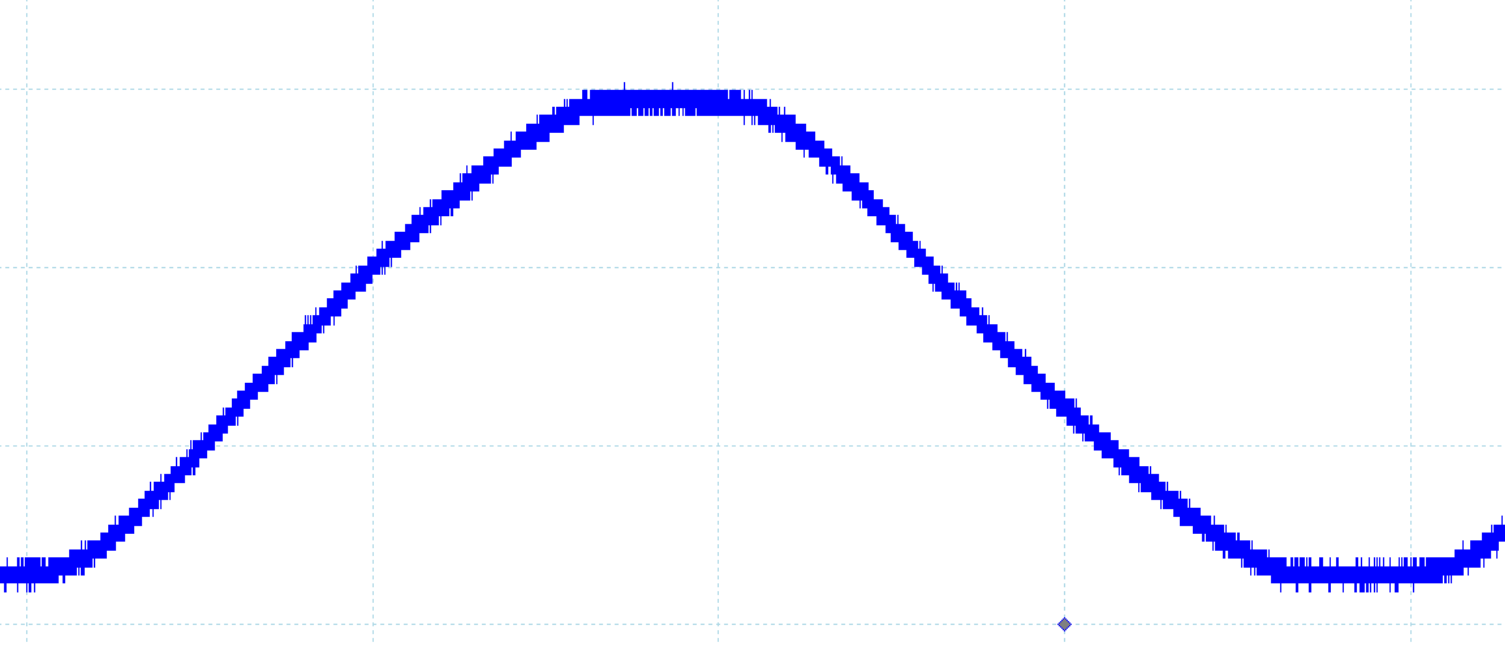
 e giusto per farvi capire la differenza, qui sotto vi mostro la forma d’onda ottenuta con il doppio trasformatore:
e giusto per farvi capire la differenza, qui sotto vi mostro la forma d’onda ottenuta con il doppio trasformatore:
Alimentazione
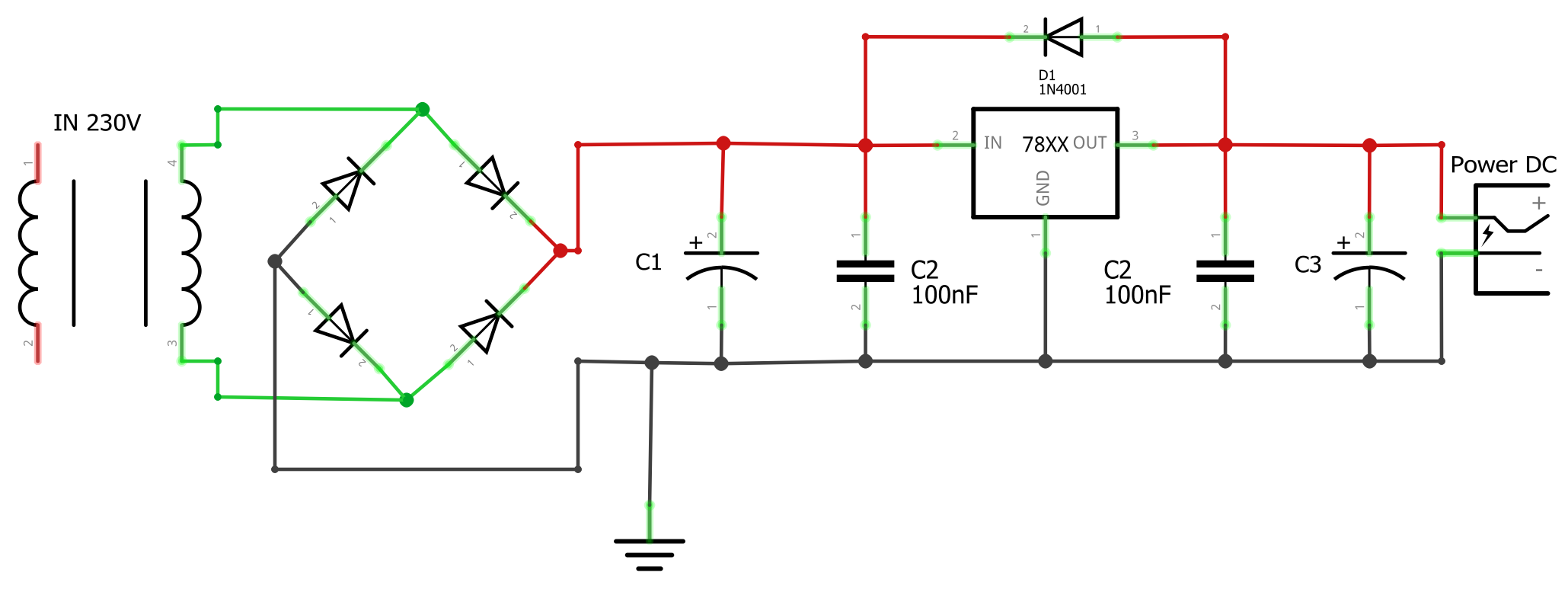
Questa volta ho deciso di costruire da me la sezione di alimentazione inizialmente la scelta era nata proprio per utilizzare un solo alimentatore, ma oramai che l’avevo già costruita ho deciso di mantenerla anche se ho in casa tutta una serie di alimentatori già pronti all’utilizzo ai quali non devo far altro che attaccare la tensione di rete in ingresso e prelevare la 5V continua in uscita. In realtà per non esagerare con questo articolo vi ho già proposto un articolo separato con la sezione di alimentazione per cui vi rimando a quell’articolo se siete interessati. L’idea è comunque quella di usare un trasformatore per leggere la tensione di rete ed un secondo per creare una linea di alimentazione a 5V tramite un LM7805. Questa linea di alimentazione a sua volta andrà ad alimentare Arduino M0 che tramite il suo regolatore di tensione interno ci fornirà anche una uscita 3.3V che sfrutteremo per alimentare l’ESP8266.
Dimensionamento del sistema
Di fatto la cosa più importante da fare è il dimensionamento del partitore di tensione per la lettura della tensione di rete. Se ricordate, non possiamo certo collegare la 230V alternata di casa direttamente all’ingresso analogico della nostra scheda di acquisizione che questa sia poi Arduino, RaspBerry, Node-MCU o quel che volete, non cambia nulla. Ciò è dovuto a due fattori, in primis non dobbiamo fornire agli ingressi analogici un segnale negativo pena la possibile distruzione della scheda stessa, in secondo luogo i 230V sono del tutto incompatibili con i 5 o 3.3V comunemente impiegati in queste schede. Quindi come facciamo? Prendiamo un semplice trasformatore che appunto trasforma la tensione originale in una più piccola mantenendone il segnale alternato invariato. Il tipo di trasformatore verrà scelto in base a questi limiti, ma non dovete aspettarvi una trasformazione diretta da 230V a 5V o 3.3V, piuttosto si opta per un valore intermedio che potrebbe essere 12 o 9V al quale si applica poi un partitore di tensione. A questo punto dobbiamo cominciare a fare un po’ di calcoli, che chiaramente saranno dipendenti dal trasformatore a vostra disposizione. Io ad esempio ho a disposizione un trasformatore dichiarato essere a 9V.
Ora per prima cosa dobbiamo collegare il trasformatore alla 230V. Per farlo dobbiamo creare un circuito provvisorio per cui mi raccomando perché questa è una fase potenzialmente pericolosa in quanto i capi della 230V sono scoperti ed il rischio di prendere una bella scossa è alto. Una volta collegato prendiamo il nostro multimetro e misuriamo la tensione sia in ingresso, sia in uscita. Nel mio caso, e rispetto ai vecchi articoli ho un nuovo multimetro più performante, misuro 228V da un lato e 14.7 V dall’altro. Faccio notare che fra i 9 dichiarati ed i 14.7 misurati c’è una bella differenza e questo è il motivo per cui dobbiamo fare questa misurazione. Facendo il rapporto fra i due otteniamo 228 / 14.7 = 15.5. Questo significa che il rapporto fra la tensione di ingresso e quella di uscita è pari a 15.5. Ora, sappiamo che la tensione in ingresso è di 230V, ma a noi interessa il valore di picco massimo e non il cosiddetto valore rms di cui abbiamo discusso nei precedenti articoli. Quindi, per prima cosa dobbiamo conoscere la variabilità di ingresso della tensione che deve essere al massimo del 10% (per legge), ciò significa che i valori RMS massimi e minimi della tensione di rete in Italia sono di 207-253V. Questo però è appunto il valore rms, per ricavare i valori di picco dobbiamo moltiplicare per la radice quadrata di 2 (1.414) per cui otteniamo 293-358V. Quindi il picco massimo della tensione di rete è di 358V. Dividendo questo valore per il rapporto prima ottenuto, ricaviamo che 358 / 15.5 otteniamo 23 per cui il picco di tensione massimo sul secondario del trasformatore è di 23V.
Ora il nostro scopo è far si che le oscillazioni comprese fra -23 e +23V vengano riscalate dal nostro partitore in modo che rientrino nell’intervallo fra 0 e 3.3V, ossia il picco negativo di -23 non deve scendere sotto gli 0V ed il picco massimo positivo di 23V non deve andare oltre i 3.3V. Se è vero che l’intervallo di 3.3V (da 0 a 3.3V) corrisponde all’intervallo di ingresso di 46V (da -23 a +23V) possiamo pensare allo stesso modo che l’intervallo di 1.65V (3.3/2) di Arduino corrisponderà ad un intervallo in ingresso di 23V (46/2) dal secondario del trasformatore. Usando questi dati possiamo calcolare i valori per il partitore di tensione. Ci sono ovviamente un’infinità di valori che possiamo utilizzare, ma se dovete fare una scelta fra varie possibilità che potreste avere con quanto disponete in casa, vi consiglio di usare i valori tendenzialmente più alti a vostra disposizione in modo da ridurre il consumo energetico del sistema oltre che ridurre la corrente massima che potrebbe raggiungere la scheda di acquisizione in caso di scariche impreviste.
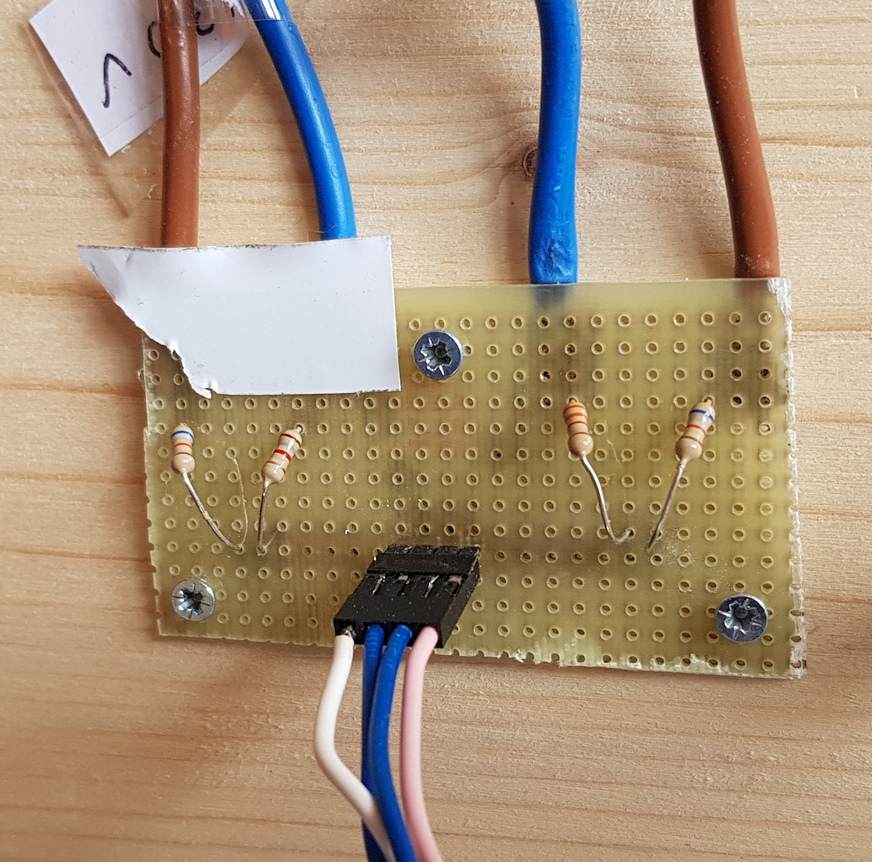
Nel mio caso, rovistando fra il materiale che ho in casa ho selezionato due resistori rispettivamente da 47K e 3.3K che mi permettono di avere un’escursione sino a 1.51V contro il massimo calcolato di 1.65V. Avrei potuto fare di meglio usando un resistore variabile, basta settarlo sul giusto valore e bloccarlo poi con della cera o colla a caldo per impedire successive variazioni accidentali ma visto che comunque la tensione non varia poi così tanto, non ha senso cercare di raggiungere il massimo possibile della precisione.
Ora, se utilizzassimo solamente quel partitore, otterremmo in uscita valori fra -1.65 e +1.65V (con il partitore da me usato fra -1.51 e +1.51) mentre a noi interessano valori fra 0 e 3.3V. Per traslare i valori dobbiamo prendere la linea a 3.3V di alimentazione e “dividerla” con un secondo partitore composto da due resistori identici, in questo modo in uscita abbiamo 1.65V che possiamo “aggiungere” al segnale dell’altro partitore portando il range fra 0 e 3.3V. Come vi dicevo la scorsa volta l’ 1.65V ottenuto non sarà mai così perfetto, vuoi perché i resistori non saranno identici, vuoi perché la temperatura ne modifica il valore di resistenza. Per tale motivo farò come la scorsa volta, ossia preleverò tale valore ed andrò a leggerlo con uno degli ingressi analogici di Arduino per conoscerne il valore reale, cosa che mi permette di fare poi misure più accurate. Inizialmente avevo pensato di usare due resistori da 100K come riportato nello schema che segue, ma poi facendo alcune simulazioni al PC ho notato che ciò comporta un rallentamento notevole nel raggiungimento dell’equilibrio del sistema per cui ho optato per dei 4.7K che avevo nel cassetto.
Ora abbiamo ottenuto una tensione alternata fra un minimo di 0V ed un massimo di 3.3V (reale teorico di 3.02) in base alle massime oscillazioni della tensione di rete. Inoltre abbiamo la lettura del “punto medio” per permetterci misure più accurate.
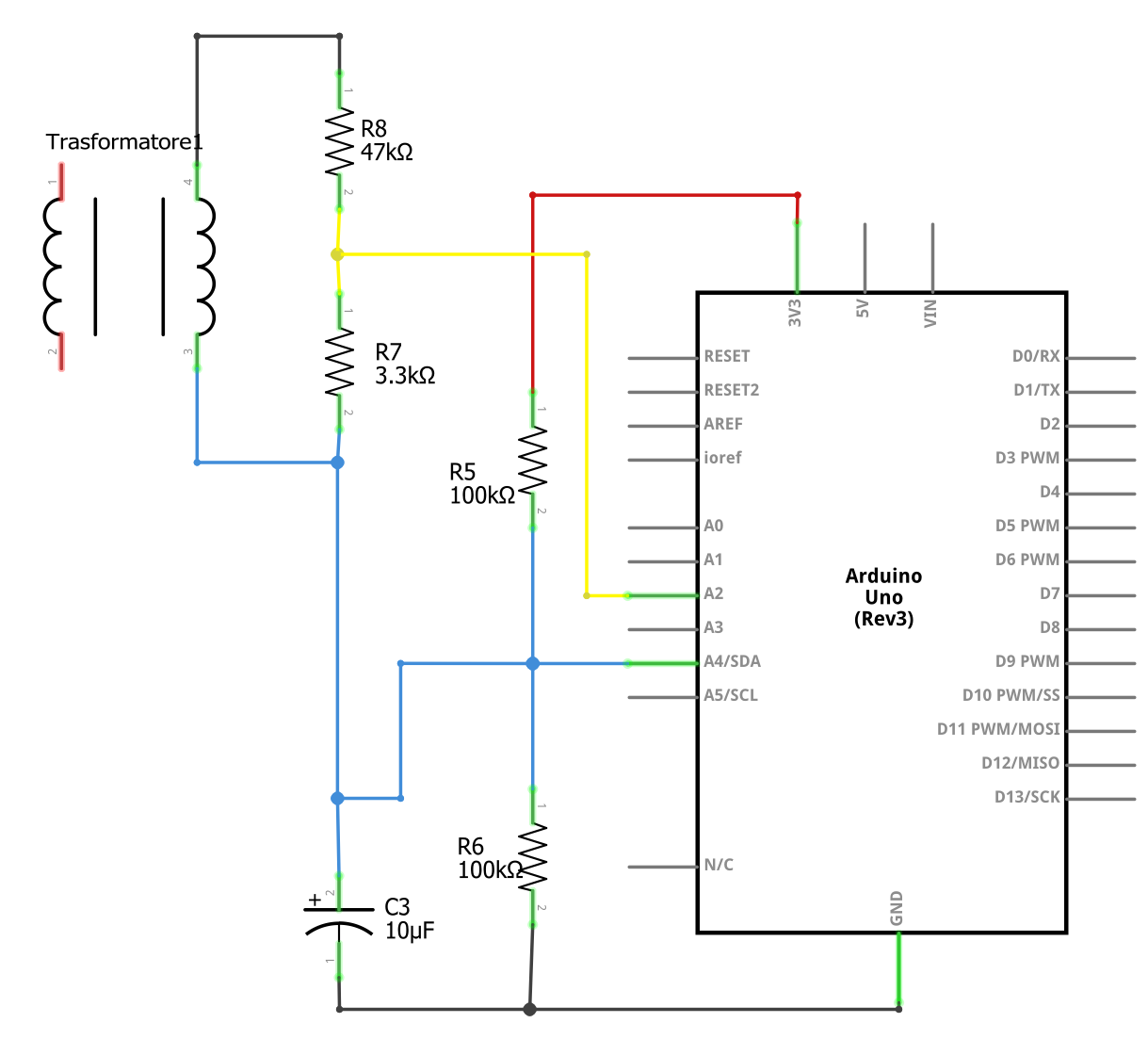
Qui sopra vi ho allegato uno schema riassuntivo. La tensione 3.3V (rosso) arriva al partitore di tensione e fra i due resistori da 100K (poi sostituiti con 4.7K) passa da 3.3 a 1.65V. Da qui da una parte vado in un ingresso analogico per misurare la tensione reale (nello schema ho usato un Arduino UNO, ma non fateci caso, il tipo di scheda non ha importanza), dall’altra vado ad uno dei capi del secondario del trasformatore in modo da “sommare” l’1.65V alla tensione alternata che esce da esso e che a sua volta attraversa il partitore di tensione. Ricordiamoci che una tensione è una differenza di potenziale fra due punti, nella stragrande maggioranza dei casi utilizziamo il riferimento a massa per il polo negativo, quindi una tensione pari a zero. In questo caso noi cambiamo il riferimento con una tensione positiva di 1.65V (riferimento azzurro) per cui l’uscita dal partitore (giallo) ci sarà una tensione alternata -1.65 / +1.65 se la misuriamo fra i punti blu e giallo. Ma se la stessa misura la facciamo fra il punto giallo e nero, ossia ciò che fa Arduino, andiamo a misurare la somma di quella tensione alternata alla tensione continua di 1.65V per cui complessivamente abbiamo una tensione oscillante fra 0 e 3.3V.
Ora, ai fini di fornire un minimo di protezione extra, come nello scorso articolo andrò ad usare i diodi contrapposti per scaricare eventuali sovratensioni positive o negative, a cui vado ad associare un piccolo filtro RC (100nF, 220Ω) che permette di ridurre alcune componenti ad alta frequenza del rumore di fondo e fornisce un limite, pur minimo, alla corrente che può raggiungere il pin di lettura di Arduino.
Per quanto riguarda la corrente prodotta dal sistema fotovoltaico e quella assorbita dalla casa, userò le pinze amperometriche da 30A già usate in precedenza e che come sappiamo forniscono in uscita una tensione da – 1 a 1V dove il segno indica il verso di scorrimento della corrente. Anche in questo caso non possiamo leggere tensioni negative per cui sommiamo di nuovo il punto medio prima ottenuto, al segnale in uscita dalle sonde. Di fatto otteniamo dei valori compresi fra 0.65 e 2.65V con assorbimenti massimi rispettivi compresi fra -30A e +30A. In questo caso la tensione, dopo l’aggiunta di 1.65V, è perfettamente compatibile con gli ingressi analogici di Arduino per cui non abbiamo bisogno di ulteriori modifiche. A dirla tutta poteva essere auspicabile una leggera amplificazione del segnale per sfruttare meglio tutto il range di lettura, avremmo ad esempio potuto usare degli operazionali, ma poi dobbiamo occuparci anche del rumore aggiunto da questi ultimi (quelli che ho in casa sono molto rumorosi). Inoltre non sfruttando completamente il range di lettura, abbiamo la possibilità di superare i 30A di carico senza rischiare di danneggiare Arduino (anche se il mio impianto i 30A non li reggerebbe).
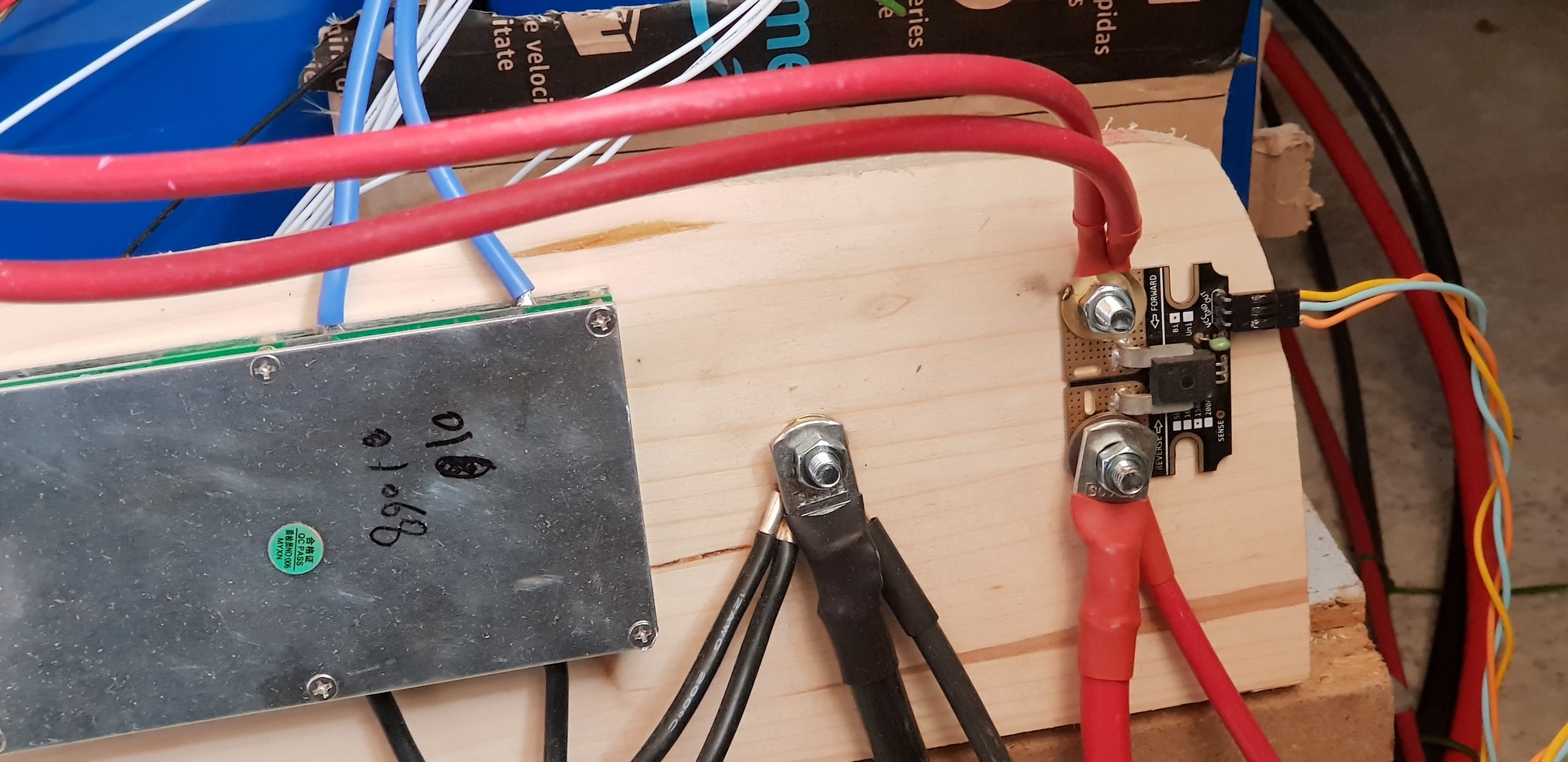
La novità
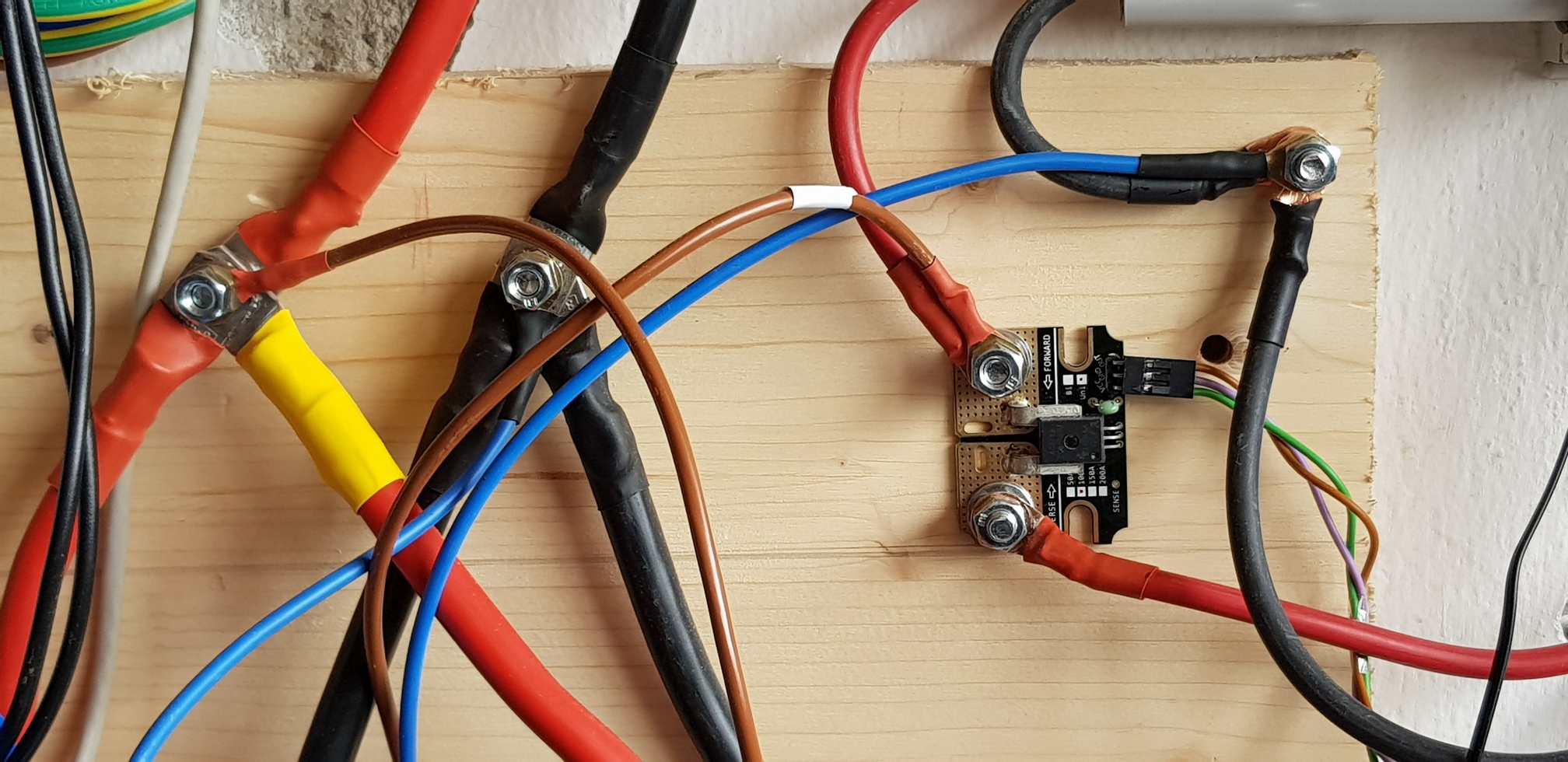
Quello che abbiamo visto sinora era già stato affrontato in precedenti articoli, sinora abbiamo solamente revisionato 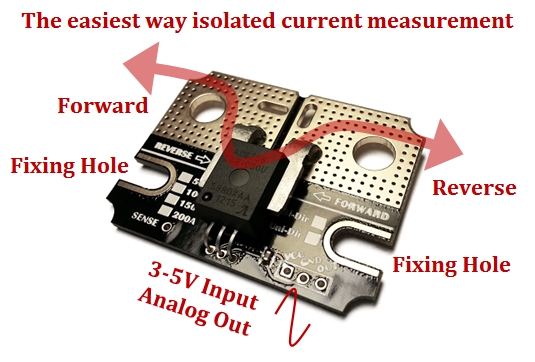 il calcolo del partitore di tensione per adattarsi ai 3.3V e al diverso trasformatore usato. Ma ora abbiamo nuove esigenze che dobbiamo andare a colmare. Più nel dettaglio abbiamo l’esigenza di misurare due correnti continue che sono quella in ingresso dai pannelli fotovoltaici all’inverter e quella che transita bidirezionalmente da inverter a pacco batterie. Per fare queste misurazioni ho acquistato due sensori come quelli che vedete nella figura qui a lato, uno bidirezionali da 150A ed uno mono-direzionale da 100A, il primo per misurare la corrente che transita da / verso il pacco batterie, il secondo per misurare la corrente che dal combinatore solare si dirige verso il regolatore di carica. Anche in questo caso per non dilungarmi eccessivamente ho scritto un articolo separato che potete andare a leggere se siete interessati. Per misurare invece la tensione della batteria e quella che proviene dai pannelli possiamo semplicemente utilizzare dei partitori di tensione, ricordiamoci però che questa non sarà particolarmente precisa durante le fasi di carica e scarica. Nel caso specifico ho pensato di calcolare come tensioni massime in ingresso, 130V per i pannelli fotovoltaici e 70V per le batterie, valori che sono ampiamente abbondanti rispetto a quanto realmente previsto. Nel primo caso ho usato un partitore di 68K / 1.8K e nel secondo uno da 68K /3.3K.
il calcolo del partitore di tensione per adattarsi ai 3.3V e al diverso trasformatore usato. Ma ora abbiamo nuove esigenze che dobbiamo andare a colmare. Più nel dettaglio abbiamo l’esigenza di misurare due correnti continue che sono quella in ingresso dai pannelli fotovoltaici all’inverter e quella che transita bidirezionalmente da inverter a pacco batterie. Per fare queste misurazioni ho acquistato due sensori come quelli che vedete nella figura qui a lato, uno bidirezionali da 150A ed uno mono-direzionale da 100A, il primo per misurare la corrente che transita da / verso il pacco batterie, il secondo per misurare la corrente che dal combinatore solare si dirige verso il regolatore di carica. Anche in questo caso per non dilungarmi eccessivamente ho scritto un articolo separato che potete andare a leggere se siete interessati. Per misurare invece la tensione della batteria e quella che proviene dai pannelli possiamo semplicemente utilizzare dei partitori di tensione, ricordiamoci però che questa non sarà particolarmente precisa durante le fasi di carica e scarica. Nel caso specifico ho pensato di calcolare come tensioni massime in ingresso, 130V per i pannelli fotovoltaici e 70V per le batterie, valori che sono ampiamente abbondanti rispetto a quanto realmente previsto. Nel primo caso ho usato un partitore di 68K / 1.8K e nel secondo uno da 68K /3.3K.
Improvvisare non aiuta
Giunto a questo punto e montato gran parte del progetto mi accorgo di un errore progettuale così elementare da chiedermi quanto sono rimbambito. Ho detto che volevo mettere tre pinze amperometriche, leggere il “punto medio”, la tensione di rete, la carica / scarica delle batterie, la corrente prodotta dai pannelli e la tensione della batteria. Bene sono 8 valori da leggere ma l’Arduino da me preso in considerazione ha solo 6 ingressi. A questo punto le strade sono tre. Posso cambiare tipologia di Arduino, espandere il numero di porte analogiche a disposizione o rinunciare ad alcune letture.
Ho scelto la via più semplice, ossia farò delle rinunce. No, dai, scherzavo, mi è venuta la tentazione ma ho deciso di espandere gli ingressi analogici come vi ho nel frattempo spiegato in questo articolo. Se non l’avete letto, sappiate che con uno di quei chip posso trasformare un singolo ingresso analogico in 8 ingressi, quindi di fatto se ne aggiungono 7 anche se al prezzo di 3 pin digitali che servono a “selezionare” il canale da leggere. Visto però il tempo perso ho deciso di ricominciare da capo ed ho deciso di disegnare un pcb ben fatto, anche perchè lo so che alla fine ci sarà qualcun altro che vorrà realizzare lo stesso progetto per cui tanto vale fare le cose per bene. Ovviamente la mia infinita fortuna vuole che questa fosse la prima volta che non usavo uno zoccoletto di supporto per cui avevo stagnato direttamente i pin di arduino M0 sulla millefori ed ora mi tocca dissaldare tutto e dare una bella ripulita. Pazienza, tanto lavoro sprecato ma ci tengo a mostrarvi un progetto ben sviluppato e come sempre non vi nascondo gli errori che ho fatto. Tra le altre ho dovuto fare estese modifiche alla mia libreria per supportare il multiplexing delle uscite, quindi è comunque stata una cosa positiva visto che ora posso usare in maniera del tutto indifferente gli ingressi nativi come quelli multiplexati o un mix dei due. Non vi nasconderò che ho fatto anche due errori sul pcb, non dovuti ad errori progettuali, ma al software, Fritzing, che si dimostra davvero insufficiente e in ben due casi non mi ha segnalato due nodi non connessi benché graficamente lo sembrassero.
ESP-01
In questo progetto ho deciso di affiancare Arduino M0 ad un modulo ESP-01 per dargli connettività WiFi. L’ESP si occuperà della connessione in rete e della trasmissione dei dati ad un server remoto. La fase di invio dati e successiva visualizzazione è ancora primordiale, come saprete sto creando un software molto complesso proprio per gestire questo tipo di situazioni, ma ho ancora tanto lavoro da fare prima di potervelo presentare. Comunque se volete un’anteprima potete sbirciare la temperatura del mio salotto. Vi avviso però che il sistema cambia continuamente e talvolta potreste trovare pagine di errori, mancanti, etc. Nulla vieta ovviamente di cambiare totalmente gli sketch ed usare sistemi alternativi già reali e funzionanti, come ad esempio Cayenne o altri. Per ora non mi dilungherò visto che il lavoro non è ancora del tutto completo, ma , giusto per riassumere, utilizzo una UART per far comunicare Arduino M0 con il modulo ESP. Tramite un protocollo da me sviluppato, i due si scambiano dei comandi che permettono alla fin dei conti di dare la connettività WiFi ad Arduino. Nel momento in cui vi scrivo non ho ancora completato questa fase, devo ancora completare il software di comunicazione fra le schede. Sono a buon punto, ho anche già inviato i primi dati remoti, ma c’èa ancora del lavoro da fare, anche perchè non è semplice prevedere tutte le possibilità che si possono avere. Giusto per fare degli esempi deve essere pensata la possibilità che il router abbia un problema e si perda la connessione, che una delle due schede si resetti, che ci siano errori di comunicazione sulla UART, etc, etc. Ma ve ne riparlerò in un articolo futuro.
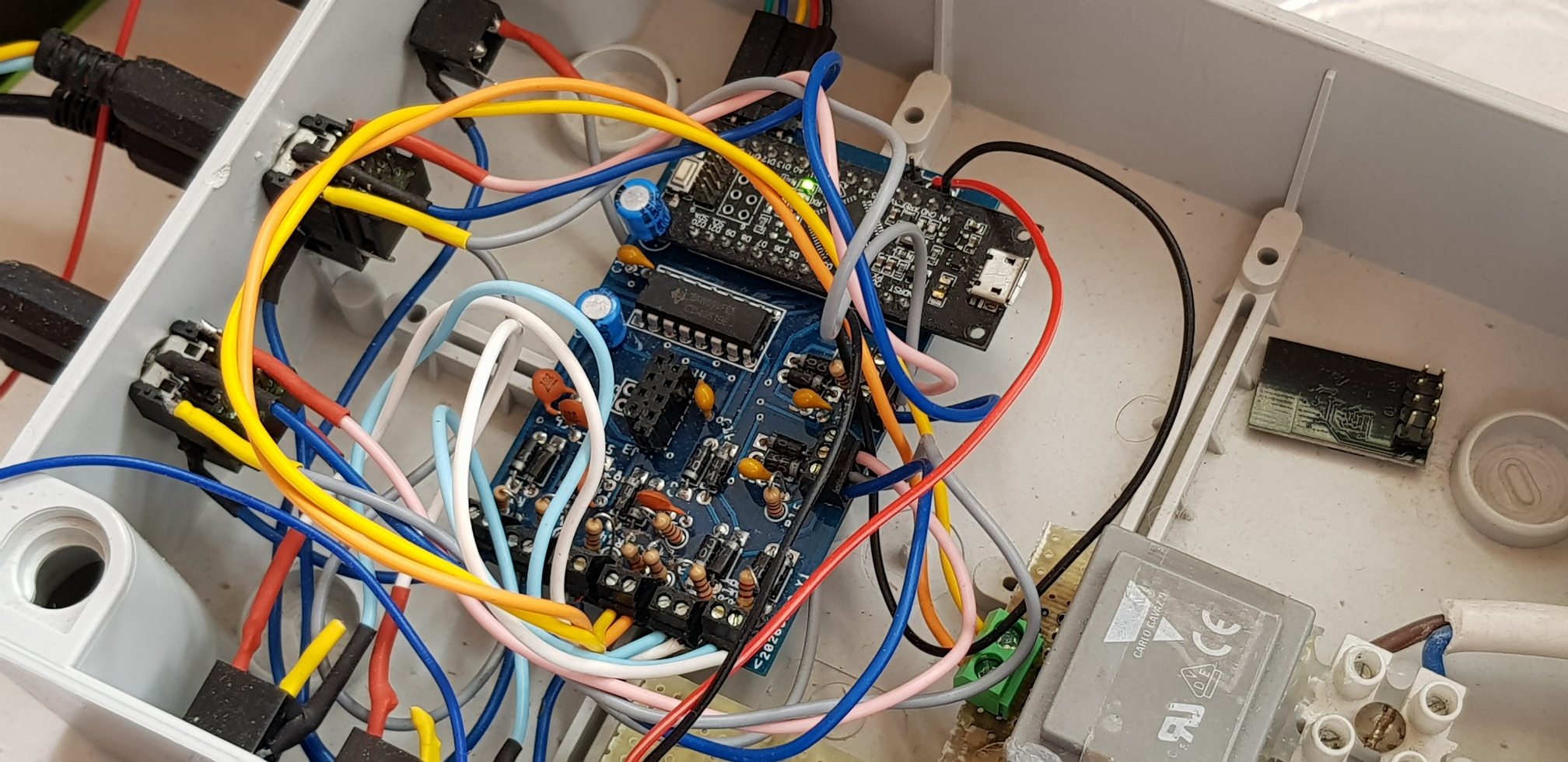
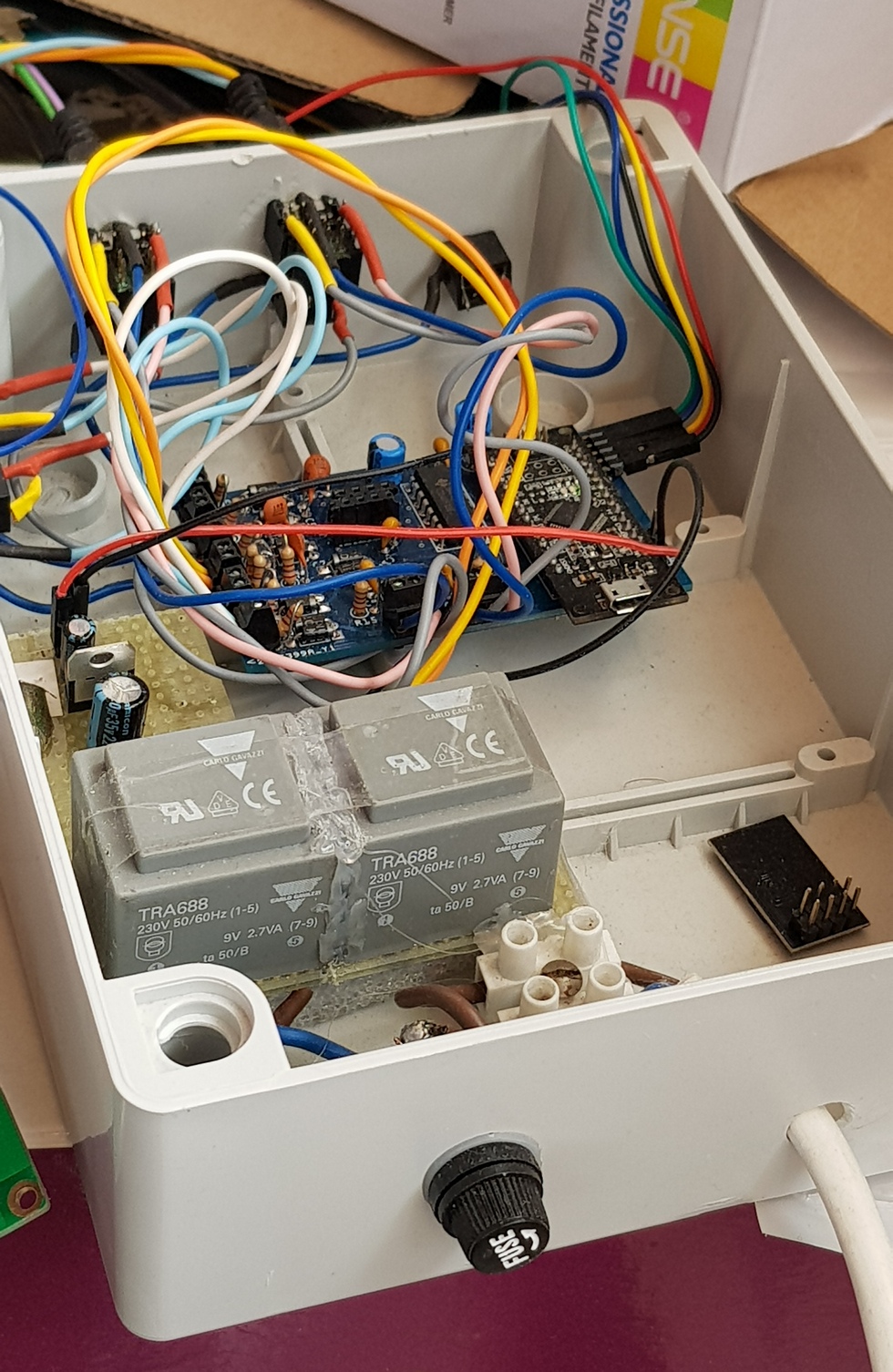
Assemblaggio

Per la prima volta ho mandato in stampa il PCB su JLC-PCB approfittando di un buono sconto di un conosciuto youtuber. Quindi, come potete vedere qui a lato, ho realizzato dei circuiti stampati su misura, il che mi permette di realizzare il prototipo in meno tempo e con più affidabilità. Non ho incluso nel pcb l’alloggiamento per i trasformatori per il semplice motivo che quelli che ho sono tutti diversi per cui preferisco fare il pcb per tutta la parte circuitale vera e propria e lasciare all’esterno i trasformatori. Bene. Non ci resta che armarci di saldatore e un po’ di pazienza.
Maledetta IDE
Uno dei “vantaggi” dell’uso dell’IDE Arduino, è la semplicità di utilizzo della stessa e la possibilità di utilizzare la stessa interfaccia per programmare una miriade di schede differenti. E’ però un ambiente pensato per principianti e che mal si adatta ad un utilizzo professionale. Visto che questa interfaccia è nata per gestire progetti da parte di persone anche con scarse competenze, i “settaggi” usati di base sono sempre molto conservativi e ciò fa si che certe operazioni possano essere rallentate anche di 10 volte rispetto a quanto realmente possibile. Ed eccomi qui, faccio le prime prove di campionamento con questo nuovo progetto e mi accorgo che Arduino M0 riesce a fare solamente sei ( 6 ! ) campionamenti completi di un’onda a 50Hz. Ok, sono 12bit che ho sovracampionato a 13 ma con Arduino UNO 10 sovracampionati a 11, riuscivo a fare un centinaio di campionamenti. In prima battuta avevo pensato di aver fatto qualche vistoso errore nell’aggiornamento della mia libreria, ho cambiato alcuni algoritmi che ora sono più impattanti anche se più precisi ed ho inserito il multiplexing dell’ingresso analogico con il chip 74HC4051, ma la differenza mi pareva davvero troppa. Ed infatti fatta una breve ricerca, mi rendo conto che le “impostazione di base” sono molto conservative e non permettono di sfruttare al massimo la scheda. Ho perciò fatto delle semplici modifiche al software e dai 6 campionamenti sono subito passato ad una media di 130, decisamente meglio. Giusto per curiosità vi lascio qui sotto la parte di codice utilizzato:
ADC->CTRLA.bit.ENABLE = 0; // Disable ADC while( ADC->STATUS.bit.SYNCBUSY == 1 ); // Wait for synchronization ADC->CTRLB.reg = ADC_CTRLB_PRESCALER_DIV64 | // Divide Clock by 64. ADC_CTRLB_RESSEL_12BIT; // Result on 12 bits ADC->AVGCTRL.reg = ADC_AVGCTRL_SAMPLENUM_1 | // 1 sample ADC_AVGCTRL_ADJRES(0x00ul); // Adjusting result by 0 ADC->SAMPCTRL.reg = 0x00; // Sampling Time Length = 0 ADC->CTRLA.bit.ENABLE = 1; // Enable ADC while( ADC->STATUS.bit.SYNCBUSY == 1 ); // Wait for synchronization
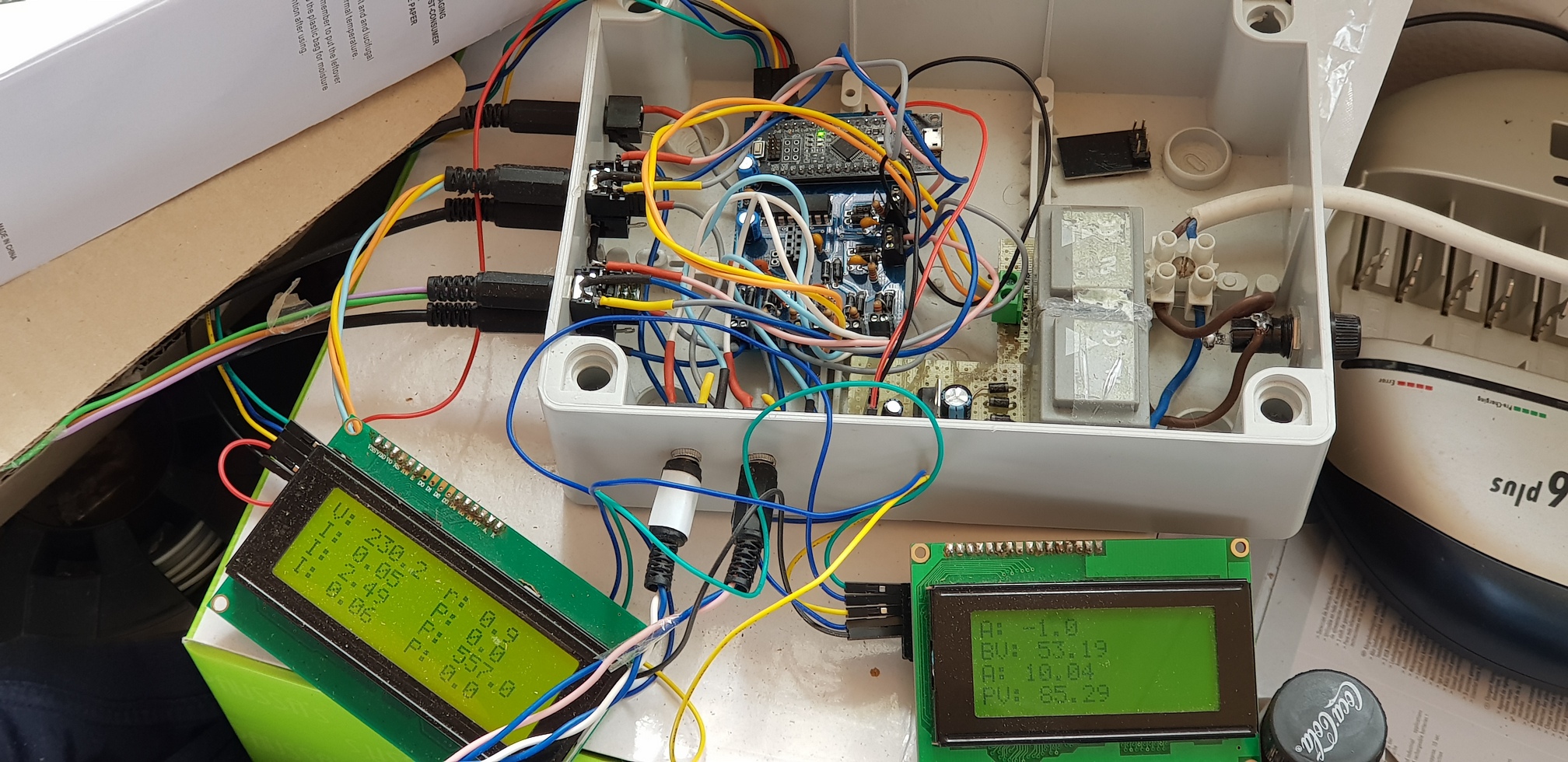
Beh ragazzi, messo tutto insieme finalmente siamo pronti per provare. Comincio le prime prove e subito mi accorgo che c’è ancora qualcosa di sbagliato. Mentre per la prima pinza amperometrica tutto andava liscio, la altre due non mi davano i valori attesi. Ricontrollato mille volte tutto l’hardware ho pensato ad un problema software ed ho scritto uno sketch apposito per fare il debug di tutte le funzionalità del sistema, per scoprire che il mio software non aveva nessun problema. Infatti come vi ho scritto qui, il tutto nasceva da un problema di alcune schede Arduino M0 hanno i gpio 2 e 4 invertite, ma vi assicuro che per scoprirlo ho perso una settimana.
Finalmente
Eh già, tanto lavoro con tanti problemi ma alla fine ci siamo. Il sistema di monitoraggio funziona come atteso ma questo è solo il primo passo. Ora devo completare la parte di software che comunica con l’ESP-01 per mandare i dati in rete ed integrare il tutto con il sistema che stò sviluppando e di cui vi accennavo. Bene siamo giunti al termine di questo lungo articolo, spero possa essere utile a chi vuole seguire questi miei passi. Appena avrò terminato il tutto vi farò un secondo breve articolo per mostrarvi il funzionamento del sistema. A presto quindi e non dimenticatevi di visitare il mio canale youtube.
 |
 |
 |
 |
 |
 |
 |
 |
 |

