
 Per ottenere un movimento ci servono però dei sistemi che convertono una corrente elettrica in un movimento. Possiamo usare dei sistemi pneumatici o elettrici, poco importa. Oggi vediamo come usare un classicissimo attuatore elettromeccanico come quello qui in figura. Internamente sono composti da una vite senza fine, un motore ed alcuni ingranaggi che modificano il numero di giri, il tutto condito da alcuni fine corsa e da un rivestimento ermetico. Ve ne sono di diverse misure in base all’esigenza. Sono attuatori molto potenti, che permettono di spostare dei carichi importanti. Inoltre quando non sono attivati, mantengono la posizione statica in cui sono lasciati e non hanno problemi a sopportare anche decine di Kg.
Per ottenere un movimento ci servono però dei sistemi che convertono una corrente elettrica in un movimento. Possiamo usare dei sistemi pneumatici o elettrici, poco importa. Oggi vediamo come usare un classicissimo attuatore elettromeccanico come quello qui in figura. Internamente sono composti da una vite senza fine, un motore ed alcuni ingranaggi che modificano il numero di giri, il tutto condito da alcuni fine corsa e da un rivestimento ermetico. Ve ne sono di diverse misure in base all’esigenza. Sono attuatori molto potenti, che permettono di spostare dei carichi importanti. Inoltre quando non sono attivati, mantengono la posizione statica in cui sono lasciati e non hanno problemi a sopportare anche decine di Kg.
Questi motori vengono gestiti con un segnale di tipo PWM. Nulla di più semplice. Ci sono però delle complicazioni di cui dobbiamo tener conto. Tanto per cominciare il segnale PWM di Arduino è a 5V mentre questi attuatori funzionano a 12V.
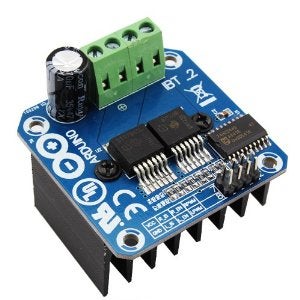 Facciamo finta per un attimo di aver convertito il segnale PWM di Arduino a 12V. A questo punto se uso un duty cycle del 100% otterrò la massima velocità del motore, mentre scendendo sino allo 0% il motore rallenterà sino a fermarsi. Ottimo, facciamo finta di aver aperto tutto il braccetto dell’attuatore. E ora come torniamo indietro? Per farlo dobbiamo invertire la polarità del motore. Ora, capirete che non possiamo certo cambiare i cavi del motore ogni volta che dobbiamo decidere se fare un’apertura o una chiusura dello stesso. Per questo utilizzeremo un cosi detto ponte H, ossia una circuiteria che permette di far arrivare al motore la corrente nei due sensi opposti in base ad un pin di controllo supplementare. Nel mio caso ho utilizzato un modulo Bt-2 come quello in figura qui sotto. Di fatto ci sono due ingressi per l’alimentazione 12V, due uscite da collegare al motore e tutti i pin per la gestione elettronica del modulo. In particolare abbiamo i 5V e GND per l’alimentazione del modulo, i pin per i segnali pwm in apertura e chiusura e due pin di “attivazione” che lasceremo sempre ad HIGH ma che in teoria possono essere usati (portandoli a LOW) per inibire l’apertura o chiusura del motore indipendentemente dal segnale PWM.
Facciamo finta per un attimo di aver convertito il segnale PWM di Arduino a 12V. A questo punto se uso un duty cycle del 100% otterrò la massima velocità del motore, mentre scendendo sino allo 0% il motore rallenterà sino a fermarsi. Ottimo, facciamo finta di aver aperto tutto il braccetto dell’attuatore. E ora come torniamo indietro? Per farlo dobbiamo invertire la polarità del motore. Ora, capirete che non possiamo certo cambiare i cavi del motore ogni volta che dobbiamo decidere se fare un’apertura o una chiusura dello stesso. Per questo utilizzeremo un cosi detto ponte H, ossia una circuiteria che permette di far arrivare al motore la corrente nei due sensi opposti in base ad un pin di controllo supplementare. Nel mio caso ho utilizzato un modulo Bt-2 come quello in figura qui sotto. Di fatto ci sono due ingressi per l’alimentazione 12V, due uscite da collegare al motore e tutti i pin per la gestione elettronica del modulo. In particolare abbiamo i 5V e GND per l’alimentazione del modulo, i pin per i segnali pwm in apertura e chiusura e due pin di “attivazione” che lasceremo sempre ad HIGH ma che in teoria possono essere usati (portandoli a LOW) per inibire l’apertura o chiusura del motore indipendentemente dal segnale PWM.
Se sei ancora qui e ti interessa questo argomento, ho preparato un video che spiega nel dettaglio tutti i passaggi da compiere per collegare l’attuatore al nostro Arduino. Buona visione !!!
Related posts:
 Quanto consuma l’ESP-01? Scopriamolo con Arduino – it
Controllare Arduino con gli infrarossi e usare Arduino come telecomando
Orologio con Arduino – it
Quanto consuma l’ESP-01? Scopriamolo con Arduino – it
Controllare Arduino con gli infrarossi e usare Arduino come telecomando
Orologio con Arduino – it
 Monitorare l’impianto fotovoltaico con Arduino – parte 1 – it
Arduino: Misurare la temperatura ambiente con sensore LM35 – it
Monitorare l’impianto fotovoltaico con Arduino – parte 1 – it
Arduino: Misurare la temperatura ambiente con sensore LM35 – it
Powered by YARPP.