
Un piccolo aiuto per un grande progetto
La richiesta di aiuto questa volta è stata davvero particolare, mi è giunta da Futuro Solare, una onlus Siciliana che si occupa dello sviluppo di tecnologie inerenti lo sviluppo di veicoli ad energia solare a basso costo, più nel particolare l’attuale progetto è un’auto a singolo pilota, che non poteva che chiamarsi Archimede. Dal 21 al 26 settembre quest’auto parteciperà all’iLumen European Solar Challenge che si terrà nel circuito di Zolder, in Belgio ed il regolamento di gara prevede quantomeno la telemetria monodirezionale, ossia la trasmissione dei dati della vettura dall’auto a bordo pista. Ciò permette di trasmettere al team i valori di capacità residua e temperatura delle batterie, la temperatura dei pannelli solari, la coppia applicata ai motori, etc, senza contare le applicazioni future che prevedono ad esempio il battito cardiaco e la temperatura corporea del pilota o la trasmissione bidirezionale per intervenire sul funzionamento della vettura. Siccome già ora tutta l’elettronica è gestita da Arduino, perchè non usare i moduli nrf24 per questo compito? Ma come spesso accade, anche il buon Marco che si occupa della realizzazione del sistema, si è trovato un po’ in difficoltà nello sviluppo del protocollo di comunicazione per cui oggi ci soffermiamo ancora una volta su questi moduli ma con una bella sorpresa, una nuova libreria sviluppata apposta per l’occasione e che andrò a breve ad integrare nella McMajan Library Pack, anch’essa aggiornata in varie parti, in particolare per renderla compatibile con Arduino Due.



Cavi e cavetti
Prima di tutto farei un ripassino su come collegare i moduli, so che è una ripetizione ma avere tutto sott’occhio nello stesso articolo è sempre molto comodo. Rivediamo perciò brevemente la piedinatura dell’interfaccia SPI che come sappiamo è differente in tutte le schede Arduino a meno di utilizzare il connettore ICSP. Qui sotto vi riporto la solita tabellina.
| Arduino Board | MOSI | MISO | SCK | SS (slave) | SS (master) |
| Uno / Duemilanove / Pro / Nano / Fio | 11 or ICSP-4 | 12 or ICSP-1 | 13 or ICSP-3 | 10 | – |
| Mega1280 or Mega2560 | 51 or ICSP-4 | 50 or ICSP-1 | 52 or ICSP-3 | 53 | – |
| Leonardo / Micro / YUN | ICSP-4 | ICSP-1 | ICSP-3 | – | – |
| Due | ICSP-4 | ICSP-1 | ICSP-3 | – | 4, 10, 52 |
| Mini | 11 | 12 | 13 | – | – |
Per completezza vi riporto in maniera grafica i pin del connettore ICSP: qui a lato potete vedere una piccola porzione di uno screenshoot della mia App 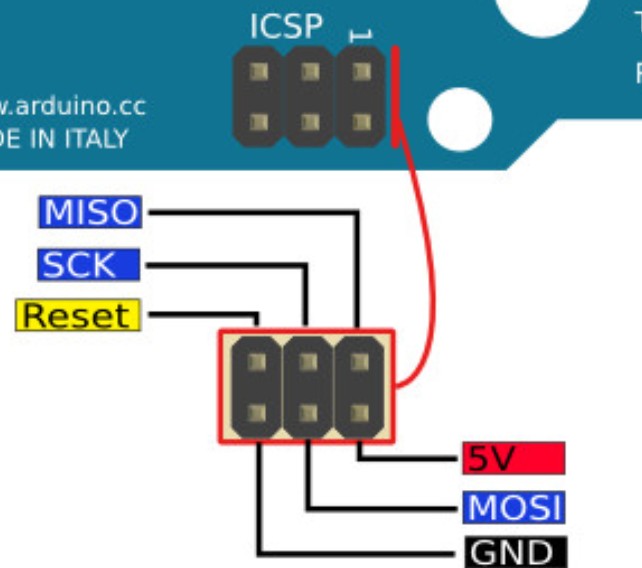 in cui si possono vedere le varie connessione nel loro “ordine fisico”. Notare il numero uno che identifica appunto il primo pin del connettore e che normalmente trovate sulle varie schede segnato con un piccolo pallino.
in cui si possono vedere le varie connessione nel loro “ordine fisico”. Notare il numero uno che identifica appunto il primo pin del connettore e che normalmente trovate sulle varie schede segnato con un piccolo pallino.
Vi propongo qui sotto uno schemino riassuntivo anche della piedinatura dei moduli NRF24. Faccio notare che il pinout è il medesimo sia per i moduli con antenna stampata che quelli con antenna esterna. Lo schema in questo caso è orientato guardando i pin esattamente come nella foto.
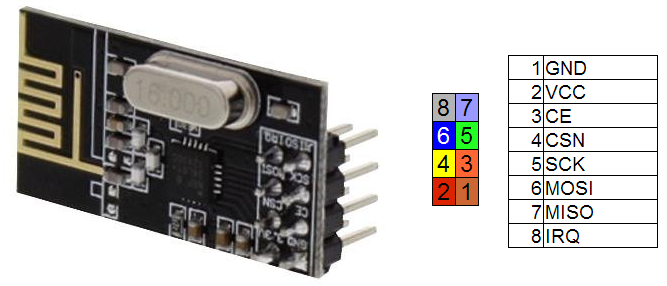
Cerchiamo di non scordare che il modulo è alimentato da una tensione compresa fra 1.9 e 3.6V ma i restanti pin sono tolleranti anche ai 5V. Per questo motivo NON potete prelevare l’alimentazione dal connettore ICSP che è a 5V a meno di non interporvi un regolatore di tensione, mentre i restanti pin possono essere tranquillamente collegati sia alle schede a 5V come Arduino UNO che a 3.3V come Arduino DUE.
McAir24
Come vi accennavo, per l’occasione ho scritto una nuova libreria, la McAir24. Questa nuova libreria è derivata della Mirf che pare non essere più supportata visto che sono diversi anni che non viene aggiornata. Ho aggiunto il supporto ad Arduino DUE, ho introdotto alcuni miglioramenti del codice e rivisitato il sistema di inizializzazione. Ma sin qui nulla di particolarmente eclatante, la vera novità sta nell’integrazione di un sistema semplificato per l’invio e ricezione di dati semplici, e con semplici intendo singoli caratteri, interi, float o unsigned long. La verità è che nella maggior parte dei casi non abbiamo bisogno di trasferire complesse strutture di dati, ma più di frequente abbiamo la necessità di inviare dati semplici, come possono essere letture di temperatura, umidità, pressione, tempo, etc. I dettagli di funzionamento della libreria ve li presenterò in una pagina apposita che pubblicherò a breve assieme alla libreria stessa, oggi ci accontentiamo di risolvere il problema della trasmissione dei dati e vedremo finalmente una prova comparativa di portata fra i moduli con antenna stampata ed esterna. Le fasi di preparazione sono abbastanza simili a quelle che avevamo con la Mirf, ho cercato di mantenerle la maggior similitudine possibile per semplificare il passaggio alla nuova libreria, per chi fosse interessato a farlo.
#include <SPI.h> #include <McAir24.h> #include <ss_nrf24.h>
Le iniziali inclusioni non hanno bisogno di particolari commenti visto che devono essere fatte così come le trovate.
void setup()
{
McAir24.init(9,10); //ce,csn
UseMcAir24Data;
McAir24.Set_Speed_Power(McAir24_SPD_1M | McAir24_PWR_18dB);
McAir24.setChannel(40);
McAir24.setRADDR((byte *)"clie1");
}
Il setup necessita di sole 5 istruzioni. Intanto vediamo che la classe McAir24 è già predefinita per cui non dobbiamo preoccuparci di definirla noi. L’istruzione init() inizializza i parametri fondamentali per il funzionamento del modulo, inoltre vengono specificati i numeri dei pin ce e csn. Attenzione che questa istruzione deve essere sempre la prima delle istruzioni che riguardano il setup del modulo. Successivamente troviamo UseMcAir24Data che come vedete non prevede l’uso delle parentesi perchè non è una funzione ma un #define che esegue alcune operazioni necessarie ad implementare il sistema di invio semplificato dei dati di cui vi accennavo (McAirData). Non è per nulla obbligatorio usare questa modalità di invio / ricezione, e nel caso venga usata si possono tranquillamente mescolare le due modalità. L’istruzione Set_Speed_Power serve a settare velocità e potenza di trasmissione del modulo, cosa che con la Mirf avveniva solamente con la manipolazione diretta dei registri. I parametri possibili sono quelli qui sotto. Vi segnalo che per oscuri motivi con i nuovi moduli in mio possesso, nonostante siano sicuramente degli nrf24L01+, non sono risuscito a settare la velocità di 250K al momento della stesura dell’articolo ne con la mia libreria ne con le altre. Ho avuto i primi riscontri positivi quando l’articolo era oramai finito per cui non troverete i test a questa velocità, ma sapete già che il passaggio a questa velocità permette di recuperare ancora un po’ di copertura del segnale se questa e la nostra priorità.
- McAir24_SPD_250K
- McAir24_SPD_1M
- McAir24_SPD_2M
Mentre i valori di potenza sono:
- McAir24_PWR_18dB
- McAir24_PWR_12dB
- McAir24_PWR_6dB
- McAir24_PWR_0dB
dove lo 0 indica la massima potenza, 18 la minima. setChannel serve chiaramente a stabilire il canale di trasmissione e ricezione, ricordo che è un valore compreso fra 0 e 127, ma in alcuni paesi potrebbero esserci delle restrizioni (sino a 84 in USA ad esempio). Ogni singolo canale aumenta la frequenza di circa 1MHz, anche se l’esatta occupazione di frequenze dipende anche da altri fattori, primo fra tutti la velocità di trasmissione. La setRADDR serve a settare l’indirizzo ricevente (5 caratteri), ossia del modulo locale. Faccio invece notare che usando il sistema McAirData non è necessario usare la setPayLoadSize in quanto viene automaticamente impostata a 6 e ricontrollata ad ogni trasmissione, ma nel caso non usiate il sistema McAirData, deve essere usata e deve avere lo stesso valore fra trasmittente e ricevente.
Ora dobbiamo preparare la trasmissione dei dati sfruttando il sistema McAirData. La prima cosa da fare è settare l’indirizzo di destinazione con l’istruzione setTADDR. Se la destinazione è sempre la medesima vi conviene inserire questa istruzione direttamente nel setup iniziale.
McAir24.setTADDR((byte *)"serv1");
Il sistema McAirData si basa su una versione leggermente modificata del sistema usato in questo vecchio articolo, più nel dettaglio per ogni dato possiamo ora specificare due valori numerici, ognuno compreso fra 0 e 255. Questi valori che ho chiamato gruppo ed elemento, possono essere usati a vostro piacimento, potreste ad esempio stabilire che il gruppo 1 contiene valori di temperatura o che il 5 contiene valori di umidità, o quel che preferite. Una volta che avete deciso il tipo di codifica da usare, non dovete far altro che usare l’istruzione SendAirData
McAir24.SendAirData(1,5,time);
Nell’esempio sopra viene inviata la variabile time, specificando un gruppo pari a 1 ed elemento pari a 5. Finito, non dovete far altro, questa istruzione si occupa di tutto, controlla la lunghezza del payload, invia il dato, attende l’effettiva trasmissione, e poi ritorna il controllo al vostro sketch. Non so se sono riuscito a chiarire il concetto, ma per inviare il dato di nostro interessa ho usato una sola istruzione, senza puntatori, allocazione di memoria ne niente altro.
Per completezza vi segnalo che è possibile aggiungere un quarto parametro opzionale che indica il delay in millisecondi da attendere fra la fine trasmissione ed il ritorno allo sketch richiamante. Questo è di default impostato a 30 e serve a concedere all’Arduino ricevente un tempo sufficiente per gestire i dati ricevuti prima che ne vengano inviati di nuovi con il concreto rischio di saturare il buffer. Se però abbiamo la certezza di non inviare ulteriori dati in rapida successione, come nell’esempio del ping, possiamo aggiungere un ,0 in modo da eliminare questo ritardo.
Ora non ci resta che leggere il dato ricevuto sul server. Anche qui vi sono venuto incontro con un lavoro di semplificazione senza eguali. Per testare se ci sono dati pronti basta utilizzare la funzione GetAirData. Questa si occupa di ogni possibile aspetto della ricezione, una volta che ritorna un valore true, saprete che è stato ricevuto un dato a cui potete facilmente accedere:
if(McAir24.GetAirData())
{
Serial.printf(McAirData.datalong); // semplificabile con McAirDataLong
Serial.printf(McAirGroup);
Serial.printf(McAirElement);
}
Come potete osservare con McAirData, McAirGroup e McAirElement potete accedere ai tre elementi della trasmissione. L’unica accortezza riguarda il primo, infatti nell’esempio trovate McAirData.datalong in quanto è atteso un dato di tipo long, ma ci sono altre tre possibilità che sono datafloat, dataint e datachar per i rispettivi tipi di dato. Ma come avrete già intuito ho semplificato ulteriormente la cosa con le parole chiave McAirDataLong, McAirDataFloat, McAirDataInt e McAirDataChar che permettono l’accesso diretto a ogni singolo tipo di dato.
Vediamo ora un semplice esempio, vi riporto due listati, da inserire rispettivamente nell’Arduino trasmittente e ricevente. Il primo listato non fa altro che preparare tre float con tre diversi valori e li invia ripetutamente alla stazione remota. Quest’ultima riceve i float, li identifica e li stampa sulla porta seriale. Nell’esempio ho usato il gruppo ‘T’ per tutti i valori, come se fossero ad esempio delle temperature, mentre come elementi ho usato i numeri progressivi 1, 2 e 3.
#include <SPI.h>
#include <McAir24.h>
#include <ss_nrf24.h>
float t1,t2,t3;
void setup()
{
Serial.begin(9600);
while (!Serial);
McAir24.init(9,10); //ce,csn
UseMcAirData;
McAir24.Set_Speed_Power(McAir24_SPD_1M | McAir24_PWR_18dB);
McAir24.setRADDR((byte *)"serv1");
McAir24.setTADDR((byte *)"clie1");
McAir24.setChannel(40);
Serial.println("Start sending data...");
t1=50.3;
t2=80.4;
t3=15.6;
}
void loop()
{
McAir24.SendAirData('T',1,t1);
McAir24.SendAirData('T',2,t2);
McAir24.SendAirData('T',3,t3);
delay(1000);
}
Per quanto riguarda la ricezione:
#include <SPI.h>
#include <McAir24.h>
#include <ss_nrf24.h>
void setup(void)
{
Serial.begin(9600);
while (!Serial);
McAir24.init(9,10); //ce,csn
UseMcAirData;
McAir24.Set_Speed_Power(McAir24_SPD_1M | McAir24_PWR_18dB);
McAir24.setRADDR((byte *)"clie1");
McAir24.setChannel(40);
Serial.println("Init OK");
}
void loop(void) // loop principale....
{
if(McAir24.GetAirData()) // controllo se ho ricevuto dati rf24
{
if(McAirGroup=='T') // lettura temperature
{
if(McAirElement==1) Serial.print("Temp1: ");
else if(McAirElement==2) Serial.print("Temp2: ");
else Serial.print("Temp xx: "); // ho volutamente "fatto finta" di non conoscere l'elemento 3
Serial.print(McAirDataFloat)); //stampo la lettura
}
else Serial.print("Gruppo non riconosciuto "); // non sono temperature
Serial.println(" ");
}
}
Spero tanto di essere riuscito a farvi capire ed apprezzare quanto diventi semplice inviare e ricevere dati grazie a McAirData. Ovviamente nella libreria che pubblicherò a breve dopo gli ultimi ritocchi, trovate tutta una serie di esempi già pronti che mostrano il funzionamento della libreria.
La portata del segnale
Come vi accennavo oltre ai moduli con antenna stampata, mi sono procurato quelli con l’antenna esterna e, giusto per completare il quadro, ho acquistato anche delle antenne esterne più performanti (9dbi) ed ora andrò a testare le reali potenzialità di questi moduli. Nella figura a lato potete vedere il confronto fra l’antenna standard del modulo e quella potenziata che ora vado a provare per la prima volta. Il mio interesse non è tanto l’utilizzo esclusivo all’aperto quanto quello indoor, in particolare mi interessa capire quanta distanza possiamo coprire in un reale ambiente casalingo. A dirla tutta però ho l’interesse a posizionare alcuni sensori / attuatori anche all’esterno della casa per cui farò delle prove anche al di fuori della casa stessa.
esterne più performanti (9dbi) ed ora andrò a testare le reali potenzialità di questi moduli. Nella figura a lato potete vedere il confronto fra l’antenna standard del modulo e quella potenziata che ora vado a provare per la prima volta. Il mio interesse non è tanto l’utilizzo esclusivo all’aperto quanto quello indoor, in particolare mi interessa capire quanta distanza possiamo coprire in un reale ambiente casalingo. A dirla tutta però ho l’interesse a posizionare alcuni sensori / attuatori anche all’esterno della casa per cui farò delle prove anche al di fuori della casa stessa.
Mi risulta davvero difficile mostrare in maniera semplice i risultati delle prove in quanto la distanza raggiunta dal segnale dipende dal numero di pareti attraversate, il loro spessore, la loro composizione, etc. Ho preparato due immagini, la prima è una schematizzazione 3D della casa dove vivo, che in realtà è solo parte di una casa molto più grande. Questa prima immagine mi permette di evidenziare meglio i segnali più deboli. La seconda immagine è una vista satellitare che mi permette di mostrare in maniera più evidente i segnali più forti. Sia chiaro che la rappresentazione non è delle più fedeli, ovviamente il segnale non segue un’ellisse perfetta in quanto la dipendenza dai muri fa si che la distribuzione sia irregolare. Inoltre nei segnali più forti non potevo certo entrare nelle case altrui per cercare i limiti di trasmissione per cui ho riportato i limiti dell’abitazione.
 In questa prima immagine a sinistra vediamo in rosso la posizione del trasmettitore. In verde vediamo la portata dei moduli con antenna stampata su pcb, con impostazione della potenza di entrambi i moduli a -18dBi e velocità di 1MB/s. Come vedete il segnale arriva a malapena oltre i muri perimetrali della stanza. Per questo motivo non ho testato i 2MB/s in quanto possono essere utili solamente per comunicazioni nel contesto della stessa stanza. La velocità di 250KB/s non l’ho testata per il semplice motivo che non sono riuscito a far funzionare i moduli a questa velocità in tempo per la stesura dell’articolo, ma dalle prove precedenti c’è da aspettarsi una copertura leggermente superiore, diciamo un ulteriore 10-15%.
In questa prima immagine a sinistra vediamo in rosso la posizione del trasmettitore. In verde vediamo la portata dei moduli con antenna stampata su pcb, con impostazione della potenza di entrambi i moduli a -18dBi e velocità di 1MB/s. Come vedete il segnale arriva a malapena oltre i muri perimetrali della stanza. Per questo motivo non ho testato i 2MB/s in quanto possono essere utili solamente per comunicazioni nel contesto della stessa stanza. La velocità di 250KB/s non l’ho testata per il semplice motivo che non sono riuscito a far funzionare i moduli a questa velocità in tempo per la stesura dell’articolo, ma dalle prove precedenti c’è da aspettarsi una copertura leggermente superiore, diciamo un ulteriore 10-15%.
In giallo vediamo gli stessi moduli, sempre a 1MB/s con la potenza portata al massimo (0dB). Come potete osservare con questa semplice modifica riesco a coprire tutto l’appartamento e parte del giardino esterno. Qui di seguito vediamo invece l’immagine satellitare della casa, in rosso verde e blu gli stessi significati dell’immagine appena vista. In azzurro invece i moduli sempre a 1MB/s a 0dB ma con l’antenna esterna e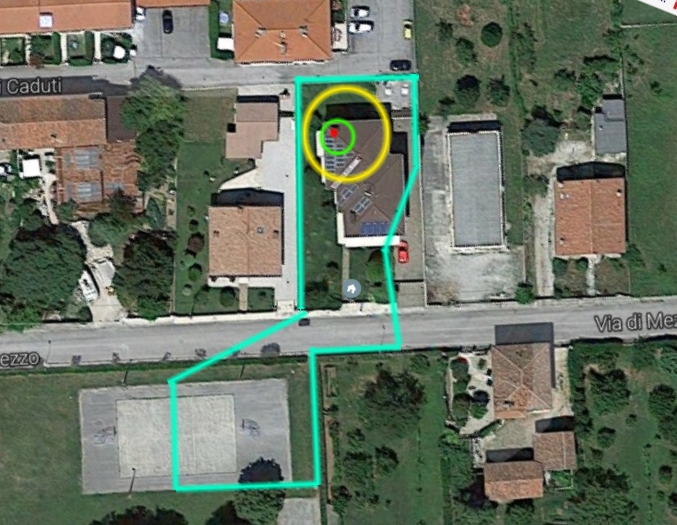 , come potete vedete, la copertura aumenta in modo considerevole. Se guardata a sinistra verso il basso, la copertura è circa 3-4 volte superiore. Faccio invece notare che in basso a destra il segnale pur molto più esteso, non copre interamente il giardino della casa. Ciò è legato al fatto che il trasmettitore si trova all’angolo opposto della casa per cui deve attraversare un numero di muri decisamente superiore, inoltre, cosa non comprensibile dall’alto, siamo da mezzo ad un piano più bassi per cui c’è parte della struttura in cemento armato del piano inferiore da attraversare. L’ultima prova ha riguardato l’antenna esterna potenziata, ma qui ho avuto una gran delusione. Nonostante abbia dotato entrambi i moduli di questo tipo di antenna, la portata complessiva ha oltrepassato di poco la limitante gialla, quella dei moduli con antenna stampata a pari velocità e potenza di trasmissione, molto peggio quindi dell’antenna esterna in dotazione. Non ho una spiegazione per questo tipo di comportamento, ma dovrò fare più approfondite verifiche per stabilire quale sia la causa del problema. Sulla vettura Archimede l’antenna usata è molto più performante e la portata all’aperto ha superato i 2.5Km, e questa è la dimostrazione che l’antenna ha la sua importanza, ma quelle che ho acquistato non sembrano all’altezza, anche se certamente non mi arrendo così facilmente al primo colpo.
, come potete vedete, la copertura aumenta in modo considerevole. Se guardata a sinistra verso il basso, la copertura è circa 3-4 volte superiore. Faccio invece notare che in basso a destra il segnale pur molto più esteso, non copre interamente il giardino della casa. Ciò è legato al fatto che il trasmettitore si trova all’angolo opposto della casa per cui deve attraversare un numero di muri decisamente superiore, inoltre, cosa non comprensibile dall’alto, siamo da mezzo ad un piano più bassi per cui c’è parte della struttura in cemento armato del piano inferiore da attraversare. L’ultima prova ha riguardato l’antenna esterna potenziata, ma qui ho avuto una gran delusione. Nonostante abbia dotato entrambi i moduli di questo tipo di antenna, la portata complessiva ha oltrepassato di poco la limitante gialla, quella dei moduli con antenna stampata a pari velocità e potenza di trasmissione, molto peggio quindi dell’antenna esterna in dotazione. Non ho una spiegazione per questo tipo di comportamento, ma dovrò fare più approfondite verifiche per stabilire quale sia la causa del problema. Sulla vettura Archimede l’antenna usata è molto più performante e la portata all’aperto ha superato i 2.5Km, e questa è la dimostrazione che l’antenna ha la sua importanza, ma quelle che ho acquistato non sembrano all’altezza, anche se certamente non mi arrendo così facilmente al primo colpo.
Ben venga una nuova libreria ma tieni conto che la libreria di riferimento per questi moduli è questa
https://github.com/TMRh20/RF24
Che invece viene aggiornata anche adesso.
Sono interessanti anche le altre librerie sempre di TMRh20
Occhio che in giro ci sono sketch che fanno riferimento ad una libreria omonima ma di Maniac Bug. E’ quasi identica ma alcune cose sono cambiate.
Tipicamente l’errore è NRF24L01 and “error: void value not ignored as it ought to be”
Ma basta cambiare lo sketch come ho scritto qui (su suggerimento di TMRh)
https://zoomxtech.wordpress.com/2015/10/13/nrf24l01-and-error-void-value-not-ignored-as-it-ought-to-be/
Dimenticavo,
un elettrolitico aggiunto all’alimentazione aiuta molto ad evitare molti errori dovuti ad alimentazione insufficiente nei picchi di trasmissione, se si alimenta il modulo da Arduino o cloni (specialmente i cloni).
C’ è la possibilità di leggere un valore del segnale ricevuto, tipo RSSI dei moduli RF Aurel o simili.
Grazie
Vincenzo
Purtroppo no. Esiste solo la possibilità di avere un input del tipo “cìè segnale sufficiente” o “non c’è segnale sufficiente”. Nella libreria in via di definizione ho aggiunto un esempio che effettua uno scan ricorsivo su tutti i canali e stampa su seriale una sorta di “grafico a caratteri” che mostra i canali con più o meno segnale, ma ciò non sostituisce certo la “forza del segnale”. E’ davvero un peccato che manchi una funzione del genere, mi avrebbe decisamente semplificato la vita 🙂
La libreria McMajanLibraryPack l’hoscaricata ed aggiunta all’IDE m durante la compilazione mi dà i seguenti errori
sketch_nov03a.ino: In function ‘void setup()’:
sketch_nov03a:13: error: ‘McAir24’ was not declared in this scope
sketch_nov03a:14: error: ‘UseMcAirData’ was not declared in this scope
sketch_nov03a:15: error: ‘McAir24_SPD_1M’ was not declared in this scope
sketch_nov03a:15: error: ‘McAir24_PWR_18dB’ was not declared in this scope
sketch_nov03a.ino: In function ‘void loop()’:
sketch_nov03a:27: error: ‘McAir24’ was not declared in this scope
Puoi aiutarmi a capire se è un problema di libreria
Grazie mille
Scusa il ritardo della risposta ma ho avuto un periodo piuttosto pienotto. Di preciso cosa stai cercando di compilare? Uno degli esempi inclusi nella libreria? Qualcosa scritto da te? Se stai semplicemente copiando gli esempi di questo articolo non funzioneranno di certo perchè l’ultima versione della libreria, vanno quantomeno cambiate tutte le inclusioni (eccetto la SPI-h) con la #include. L’altra modifica che probabilmente ti genererà un successivo errore e la necessita di aggiungere le parentesi e punto e virgola alla UsseMcAirData, cosa che ho fatto per renderla simile ad una funzione, cosa che rende il listato più leggibile. Il resto a prima vista dovrebbe funzionare.
Ti invito comunque a partire sempre dagli esempi allegati e dalla documentazione allegata in quanto fra la stesura degli articoli e “gli anni futuri” ci possono essere variazioni anche sostranziali.
Ciao,
ho provato un sacco di scketch ma i miei 2 arduini non si parlano, con la tua libreria il tx rimane in Senting… il RX rimane in Init OK.
Vorrei mandarti la foto di come ho fatto le connessioni del TX come posso fare?
scusa il ritardo ma sono molto impegnato con il lavoro. info@mcmajan.com , puoi scrivermi a quella mail anche se pensavo di aprire un forum vista la quantità di richieste che mi arrivano e a cui faccio fatica a stare dietro.
Buon giorno
Mi sono iscritto di recente
Sto cercando di usare la libreria TMRh20
per NRF24L01 con Arduino DUE.
Funziona discretamente (con qualche warning in compilazione), ma ho la necessità di salvare
i dati letti dagli slave su SD Card.
Quando eseguo i collegamenti necessari TMRh20 non
funziona piu,mente la SD card funziona.
Quando disconnetto 5v SD card TMRh20 + NRF24L01
riprende a funzionare.
Ho dato uno sguardo alla libreria McAir24 che mi sembra molto semplice
da usare e mi chiedo se e possibile superare
il problema che ho con SD + TMRh20 – NRF24L01
Grazie
Bendetto
Difficile darti una risposta certa dai pochi dati che mi dai, ma l’istinto mi fa pensare ad un classico conflitto dell’interfaccia spi. Ne ho parlato in questo articolo: https://www.mcmajan.com/mcmajanwpr/blog/2014/11/28/modulo-ethernet-spi-e-nrf24l01-su-arduino-uno-it/
Intanto ti ringrazio per
la sollecita risposta
Scusa per i pochi dati inviati per una valutazione del problema
Ti invio lo schema su Arduino DUE
___________________10__9______4______________________________
ARDUINO DUE
SPI
MISO @ @ VCC 5v
SCK @ @ MOSI
reset @ @ GND
3.3v 5.v GND GND
______________________________________________________________
SD CARD NRF24L01
CS pin 4
SCK 1-GND
MOSI 3.3V 2-VCC
MISO 3-CE pin 9
VCC 5.v 4-CSN pin 10
GND 5-SCK
6-MOSI
7-MISO
8-IRQ
PRIMO CASO Solo codice SD card 5v
#include
#include
setup()
pinMode(4, OUTPUT);
if (!SD.begin(4)) {
Serial.println(“Inizializzazione SD Fallita!”);
return;
}
etc.etc
Funziona OK legge scrive
#######################################################################
Secondo caso solo codice per NRF24L01 3.3v scollegato 5v SD card
#include
#include
#include
#include “RF24.h” //NRF24L01 library created by TMRh20 https://github.com/TMRh20/RF24
RF24 radio(9, 10);
etc.etc.
Funziona inviando dati e ricevendo dati con uno SLAVE
#######################################################################
Terzo caso SD CARD 5v + NRF24L01 3.3v
SD card OK legge scrive
NRF24L01 KO non funziona piu
Se stacco 5v SD card
SD non funziona (OVVIO)
NRF24L01 OK Funziona
Se pensi che nell’articolo da te indicato
vi sia la soluzione proverò a leggerlo
attentamente sperando di capire
Ciao
Benedetto
hhh mi sa proprio di conflitto sulle linee MISO, anche se ci vorrebbe l’oscilloscopio per verificare con certezza il problema. L’unica alternativa è che l’assorbimento di corrente complessivo supera l’erogabile da Arduino, anche se dubito. Potresti provare ad alimentare dall’esterno, giusto per escludere con certezza questo problema, ma secondo me si tratta del classico conflitto sulle linee MISO.
Grazie
aggiungerei un altro caso
SD card connessioni Miso,mosi,sck,SC non connesso 5v
commentato tutto cio che riguarda SD nel programma.
Solo codice per NRF24L01
NRF24L01 funziona OK (radio.write –>OK)
Quando collego manualmente 5v SD , NRF24L01 smette di funzionare
Se scollego nuovamente 5v SD NRF24L01 non riprende piu a funzionare (radio.write –>KO )
Un po strano non credi
Assomiglia lontanamente al principio della soluzione descritta nel tuo articolo ?.
Comunque provero la Soluzione da te proposta
Grazie nuovamente
Benedetto
Questo è il test più interessante.Strano? Direi proprio di si. Prova a fare lo stesso test scollegando fisicamente la linea MISO. Se dopo aver ridato corrente con la linea fisicamente scollegata l’NRF riprende a funzionare, allora abbiamo una quasi certezza che il problema è proprio quello. Se invece non si riprende abbiamo più dubbi che certezze.